咨询热线: 165-7620-4888
产品中心
Product



具有探针保持元件的导波雷达物位计量
技术领域
本发明涉及一种使用电磁波来确定距容纳在罐中的物品的表面的距离的物位计系统。
背景技术
微波物位计或雷达物位计(RLG)系统广泛应用于确定容纳在罐中的物品的填充物位。雷达物位计量可以例如通过非接触测量来执行,从而朝向容纳在罐中的物品辐射电磁信号。
所发射的电磁信号在物品的表面处被反射,并且通过包括在雷达物位计系统中的接收器或收发器来接收反射信号。可以基于发射信号和反射信号来确定距物品的表面的距离。例如可以基于接收到的反射信号的飞行时间(time of flight)来确定距离。在用于液态石油物品的填充物位监测和密闭输送控制的海洋应用中使用雷达物位计系统。例如,主要包括甲烷和乙烷的天然气通常在被布置成保持低于该物品的沸点的温度的大冷却罐中以液体形式在低温下进行运输。也被称为液化石油气(LPG)的重烃(例如丁烷和丙烷)可以在被配置成经受得住通常施加于液化LPG的高压的基本上呈球形的压力罐中以液体形式进行运输。
由于液化天然器(LNG)和LPG E相对低的反射率,由自由辐射天线发射的信号可能导致太小而无法检测的反射信号。这可能会例如在从收发器到物品的距离太大的情况下或在物品的表面被干扰使得信号当在表面处反射时被分散(scatter)的情况下发生。为了在大罐中以及在困难的测量条件下同样便利雷达物位计测量,已知使用所谓的静止管道(still pipe),其中在大罐处,天线与表面之间的距离可能相当大,典型地为数十米的量级。
例如W02007/049966公开了在用于测量LNG的物位的雷达物位计中使用静止管道。该静止管道与罐中的物品流体连通,并且可以通过确定在静止管道内的物品的物位来确定填充物位。通过在静止管道内发射信号,所发射的电磁信号的能量在管内集中至表面的一小部分。因此,降低了信号功率的损失,并且便利了在更长距离上以及更困难的测量条件下的测量。
另外,在海洋应用中,大浪状态会引起罐中的液体的移动,而这又导致对位于罐中的结构施加相当大的机械力。因此,布置在罐中的静止管道需要能够经受得住相当大的力的支承结构。
此外,静止管道需要大量材料,这使得静止管道昂贵,并且将静止管道安装在大罐中可能比较复杂。
发明内容
鉴于现有技术中的以上提及的缺点和其他缺点,本发明的总体目的是提供一种改进的导波雷达物位计系统,并且特别地提供一种用于罐中的流体的填充物位确定的导波雷达物位计系统。
根据本发明的第一方面,这些目的和其他目的通过用于确定容纳在罐中的物品的填充物位的导波雷达物位计系统来实现,所述物位计系统包括:罐,具有内壁、顶部和底部;收发器,用于发射电磁发射信号以及接收在所述物品的表面处反射的反射电磁信号:表面波导,包括单导体传输线探针,所述表面波导连接至收发器、被布置成竖直延伸到罐中并且被配置成朝向所述表面导引电磁发射信号并将反射电磁信号导引回到收发器;处理电路,连接至收发器并且被配置成基于所接收的反射电磁信号确定填充物位;以及多个保持元件,被布置成位于关于罐的内部的固定位置中并沿所述探针间隔开,其中,每个保持元件限定所述探针,并被配置成允许所述探针相对于保持元件在竖直方向上移动以及限制所述探针相对于保持元件在水平方向上移动。
“收发器”可以是能够发射和接收电磁信号的一种功能单元,或者可以是包括独立的发射器单元和接收器单元的系统。罐可以是能够容纳物品的任何容器或器皿,并且可以是金属的或者部分或完全非金属的。
本发明基于如下理解:通过使用机械保持元件来使探针对准,可以将使用线针(wire probe)的导波雷达物位计系统有利地用于确定罐中的流体物品的填充物位,并且特别地用于确定海船上的罐中的液化天然气(LNG)或石油天然气(LPG)的填充物位。在不同类型的罐(3米至10米高,基本上无液体的移动)中,线(wire)可以从罐顶部延伸至底部而不需要支承。在有时具有大的液体移动的LNG船上的深罐(>40米)中,线必须机械支承在若干个点上。
相应地,本发明基于对附接至支撑结构并沿探针的长度间隔开的多个机械保持元件的使用。将探针布置成被保持元件所限定,使得允许探针在竖直方向上的移动而限制在水平方向上的移动。因此,如果线针遭受例如来自罐内的液体移动的具有水平力分量的外部机械力,则该力被沿探针的长度而分布的保持元件中的一个或更多个所承受,从而降低了机械力变得如此之大以至于线针损坏的风险。
由于LNG LPG J型地在低温下以液体形式进行运输,例如甲烷典型地在其大约-162℃的沸点下进行运输,所以空罐和填充罐之间的温差可以高达200℃。因此,对于具有数十米的量级的长度的探针,当罐被填充和被倒空时可能产生相当大的热膨胀和热收缩。例如,在45米高的罐中,可能产生探针的5cm至10cm的热膨胀。因此,必须允许探针关于保持元件的特定量的竖直移动。另外,可能会期望能够简单地改变探针,而这一点在保持元件没有被机械地附接至探针时是可能的。
本发明的另外的优点是通过不使用静止管道而大幅度降低了雷达物位计系统中使用的材料量。
此外,使用具有单导体传输线探针的导波雷达(GWR)系统代替包括静止管道的自由辐射系统使得能够使用不同的信号传送方案,诸如例如调频连续波(FMCW)系统。
根据本发明的一个实施例,多个保持元件中的至少一个可以有利地附接至与探针基本上平行延伸的支承结构。根据本发明的雷达物位计系统中的支承结构不须经受与静止管道的支承结构等量的力,从而使得能够降低使用的材料量或者以其他方式简化支承结构的设计。
另外,这样的支承结构可以例如为附接至罐的顶部并且从罐的顶部基本上竖直延伸的支承塔。用于容置物品(例如 LNG 或 LPG)的罐通常与连接至罐的顶部的支承塔在一起。在这样的情况下,支承塔可以容纳用于监测罐的状态的各种传感器。如果存在这样的支承塔,则有利的是将保持元件直接附接至该塔,使得不需要另外的支承结构。
根据本发明的一个实施例,保持元件可以有利地包括电绝缘材料。为了避免探针在与保持元件物理接触时电气短路,保持元件有利地为电流绝缘的,或至少与可以安装保持元件的导电支承结构电流绝缘。
在本发明的一个实施例中,探针可以有利地为柔性线针。例如在容置液体物品(例如 LNG)的大罐中使用GwR统的柔性线针。另外,使用柔性线针允许保持元件的不同有利配置,而这些配置在使用刚性探针的情况下可能是无法实现的。此外,柔性线针可以更容易地经受得住作用在探针上的力。可以例如以实芯线或绞线的形式来提供柔性线针,并且探针可以由金属(例如不锈钢)制成。
根据本发明的一个实施例,每个保持元件可以有利地包括关于探针而竖直间隔开的至少第一电绝缘接触部分和第二电绝缘接触部分,其中每个接触部分被配置成在沿探针的接触位置处与探针接触,并且其中,相邻接触位置之间的距离约等于发射信号的波长的四分之一。由于期望将探针保持在关于保持元件的基本上固定的水平位置中以使得探针可以作用于保持元件的力被维持在最小,所以保持元件可以被布置为使得保持元件的部分与探针接触。因此,电绝缘接触部分被布置成从不同方向接触探针,使得防止探针移动。然而,与探针接触的对象、甚至是绝缘对象也将会导致沿探针传播的信号的特定反射。源自保持元件的反射可能使得更难以识别表面回波(即来自罐中的物品的表面的回波),而需要该回波来用于确定罐中的填充物位。在最坏情况的场景下,当要确定罐中的物品的填充物位时,这样的干扰回波(spurious echo)可引起错误读数。因此,为了保持良好的测量精度,保持
元件必须被设计成不干扰填充物位测量,即,来自保持元件的回波必须比来自罐中的物品的液面的回波弱得多。
然而,通过将第一电绝缘部分与第二电绝缘部分布置成彼此相距与沿探针传播的信号的波长的四分之一相对应的竖直距离,来自第一接触部分和第二接触部分的回波将被叠加,并且通过负干涉(negative interference)或相消干涉(destructiveinterference)而被有效地抑制。在本文中相消干涉是指下述现象:两个周期波(一个发生了相移)被叠加,以使得形成具有比原始信号中的每个信号低的幅度的所产生的信号。相应地,通过保持元件的接触部分的上述布置,可以降低来自保持元件的所产生的回波信号的幅度。信号的波长例如基于信号的中心频率来确定。
在本发明的一个实施例中,每个保持元件可以有利地包括:第一接触部分,被配置成对发射信号的一部分进行反射以形成第一反射信号;第二接触部分,被布置在第一接触部分之下,并被配置成对发射信号的一部分进行反射以形成第二反射信号;以及第三接触部分,被布置在第二接触部分之下,并被配置成对发射信号的一部分进行反射以形成第三反射信号:其中,这些接触部分被进一步配置为使得第一反射信号和第三反射信号中的每个的幅度约为第二反射信号的幅度的一半。通过配置这些接触部分使得幅度根据不同的接触部分而不同,可以使用三个接触部分来实现由保持元件反射而产生的回波信号的甚至进一步降低。该原理与以上结合包括两个接触部分的保持元件所描述的是相同的,不同之处在于三个不同信号被叠加以实现相消干涉。使用三个接触部分实现三个回波信号的附加优点是增加了衰减(damping)的带宽。因此,由于用于物位计量的信号通常具有特定带宽,所以优化包括两个接触部分的保持元件以获得中心频率处的衰减将不可避免地导致信号的中心频率以外的部分将较少衰减。因此,通过使用包括三个接触部分的保持元件,可以实现
信号的与中心频率偏离的部分的更有效衰减。
在本发明的一个实施例中,第一接触部分被配置成对发射信号的一部分进行反射以形成第一反射信号;第二接触部分被配置成对发射信号的一部分进行反射以形成第二反射信号:保持元件还包括:第三接触部分,被布置在第二接触部分之下约等于发射信号的波长的四分之一的距离处,并被配置成对发射信号的一部分进行反射以形成第三反射信号;第四接触部分,被布置在第三接触部分之下约等于发射信号的波长的四分之一的距离处,并被配置成对发射信号的一部分进行反射以形成第四反射信号;其中,这些接触部分被配置使得:第一反射信号的幅度等于第四反射信号的幅度,第二反射信号的幅度等于第三反射信号的幅度,并且第一反射信号和第四反射信号的幅度约为第二反射信号和第三反射信号的幅度的三分之一。以与上述方式相同的方式,使用四个接触部分进一步改进了衰减的带宽。然而,自然地存在回波信号的衰减与信号的整体衰减之间的权衡。使用越多的接触部分,则信号的整体衰减就变得越大。因此,针对特定应用的保持元件的配置优选地基于如下因素来确定:例如总发射信号强度、待计量的物品的反射特性、以及接收器中的信号处理电路的灵敏度。
根据本发明的一个实施例,保持元件可以有利地包括多个销,这些销在竖直方向上间隔开,并被布置为使得在水平面上的投影中每个销与至少一个其他销交叠。由上可见,在这样的配置中的两个销将会由此形成V-形或X-形。
在本发明的一个实施例中,保持元件的每个销可以有利地被陶瓷壳包围。如稍早所讨论的,在特定应用中期望保持元件的电绝缘特性。通过使用用于每个销或用于保持元件的陶瓷壳或者任意形状的电绝缘接触部分,提供了电绝缘的并且具有机械复原性的绝缘体。特别地,在探针例如由于热膨胀和热收缩而靠着保持元件的接触部分规则地滑动的应用中,期望接触部分的绝缘体不容易被磨损。因此,陶瓷壳还由于其对磨损能够复原而提供了有利的机械特性。
根据本发明的一个实施例,柔性材料有利地布置在销或其他类型的保持元件与陶瓷壳之间。柔性材料有助于减小作用在作为整体的保持元件、并且从而作用在支承结构上的力,这是因为探针可作用在保持元件上的力的一部分被柔性部分所承受并吸收。柔性部分可以为固体柔性材料(例如橡胶、塑料等),或者柔性部分可以为弹簧布置。
根据本发明的一个实施例,保持元件的第一部分相对于保持元件的第二部分在竖直方向上有利地间隔开,以在第一部分与第二部分之间形成开口,使得探针能够被横向插入穿过开口而进入到由保持元件限定的区域中。因此,提供了这样的保持元件:其允许穿过保持元件的不同部分的开口来容易地安装柔性探针。
在本发明的一个实施例中,保持元件可以被提供为螺旋形式,这是用于限制探针的水平移动同时允许柔性探针容易安装的简单构造。
在本发明的一个实施例中,保持元件可以有利地包括固定附接至探针的电绝缘夹持部分和附接至支承结构的柔性部分,其中,柔性部分至少在与该探针的竖直延伸平行的方向上为柔性的。
根据本发明的各个实施例的保持元件可以例如附接至罐的侧壁。因此,不需要用于实现限制探针水平移动的期望功能的附加支承结构。
在本发明的各个实施例中,探针可以附接至该罐的底部。在这样的实施例中,探针和/或附接必须被配置成允许探针的热膨胀/收缩。
可替代地,探针可以包括附接至探针的端部的底部负重,以用于稳定探针。
根据本发明的第二方面,提供了用于布置导波雷达物位计系统中的探针的方法,该导波雷达物位计系统用于确定容纳在罐中的物品的填充物位,该物位计系统包括:罐,具有侧壁、顶部和底部:收发器,用于发射电磁发射信号和接收在物品的表面处反射的反射电磁信号;连接至收发器的表面波导,包括单导体传输线探针;处理电路,连接至收发器并被配置成基于所接收的反射电磁信号确定填充物位;该方法包括:将多个保持元件布置成位于关于罐的内部的固定位置中并沿探针间隔开,其中,每个保持元件限定探针,并被配置成允许探针相对于保持元件在竖直方向上移动以及限制探针相对于保持元件在水平方向上移动:以及将探针布置成竖直延伸到进罐中并延伸穿过每个保持元件。
根据本发明的第二方面,提供了用于布置导波雷达物位计系统中的探针的方法,该导波雷达物位计系统用于确定容纳在罐中的物品的填充物位,该物位计系统包括:罐,具有侧壁、顶部和底部:收发器,用于发射电磁发射信号和接收在物品的表面处反射的反射电磁信号;连接至收发器的表面波导,包括单导体传输线探针;处理电路,连接至收发器并被配置成基于所接收的反射电磁信号确定填充物位;该方法包括:将多个保持元件布置成位于关于罐的内部的固定位置中并沿探针间隔开,其中,每个保持元件限定探针,并被配置成允许探针相对于保持元件在竖直方向上移动以及限制探针相对于保持元件在水平方向上移动:以及将探针布置成竖直延伸到进罐中并延伸穿过每个保持元件。
本发明的这个第二方面的效果和特征与以上结合本发明的第一方面描述的效果和特征基本上相似。
当研究所附权利要求和以下描述时,本发明的另外的特征和优点将变得明显。本领域的技术人员意识到,本发明的不同特征可以进行组合,以在不脱离本发明的范围的情况下得到除了以下描述的实施例之外的实施例。
附图说明
现在将参照示出了本发明的示例性实施例的附图来更详细地描述本发明的这些方面和其他方面,在附图中:
图1示意性地示出了根据本发明的实施例的系统;
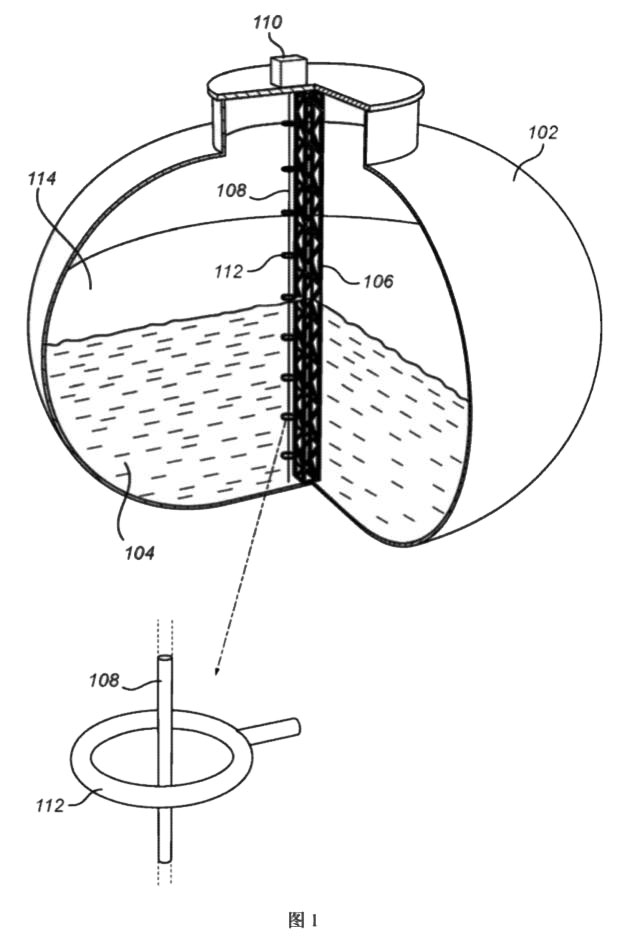
图2是根据本发明的实施例的雷达物位计系统的一部分的示意图;
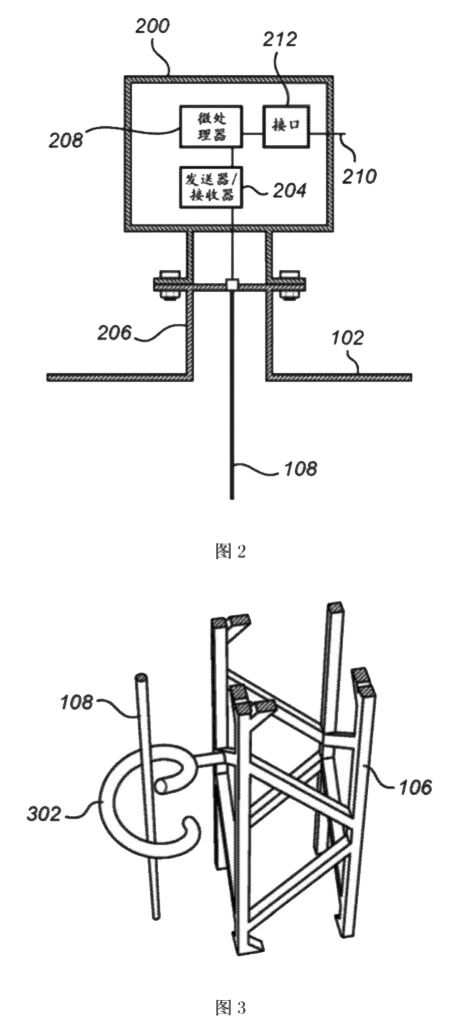
图3是根据本发明的实施例的保持元件的示意图;
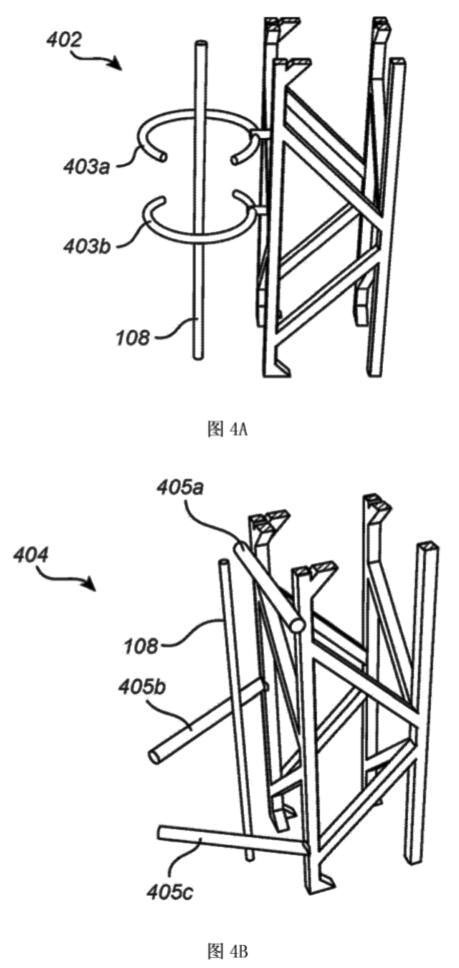
图4至图4E示出了根据本发明的各个实施例的保持元件;
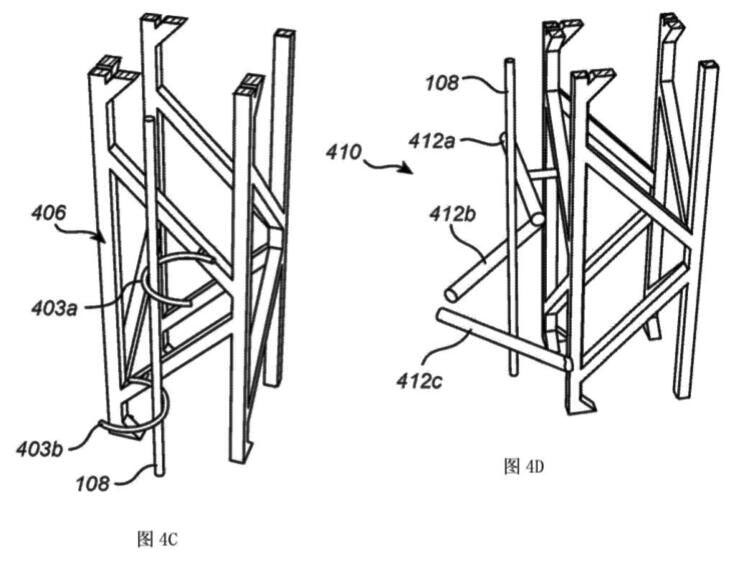
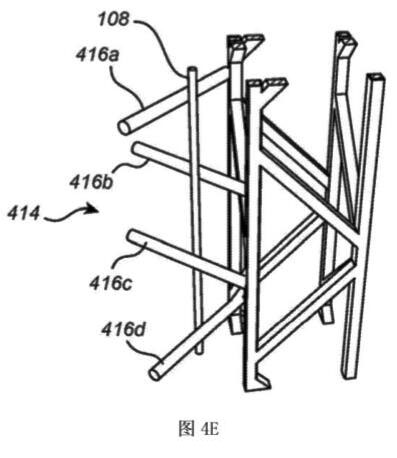
图5A至图5B是根据本发明的实施例的保持元件的示意图;
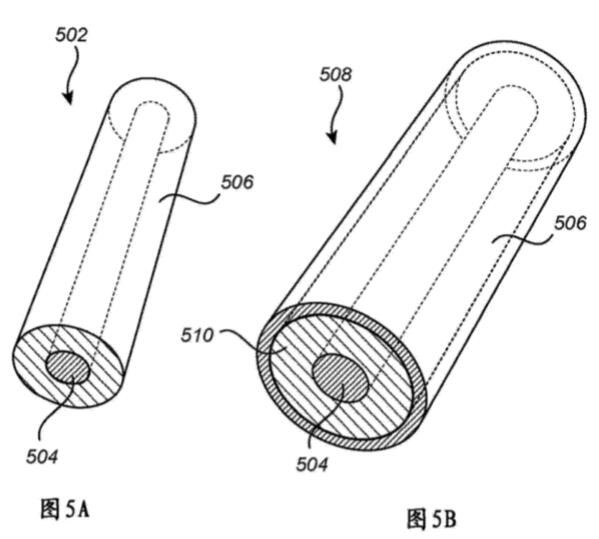
图6A至图6B是根据本发明的实施例的保持元件的示意图;
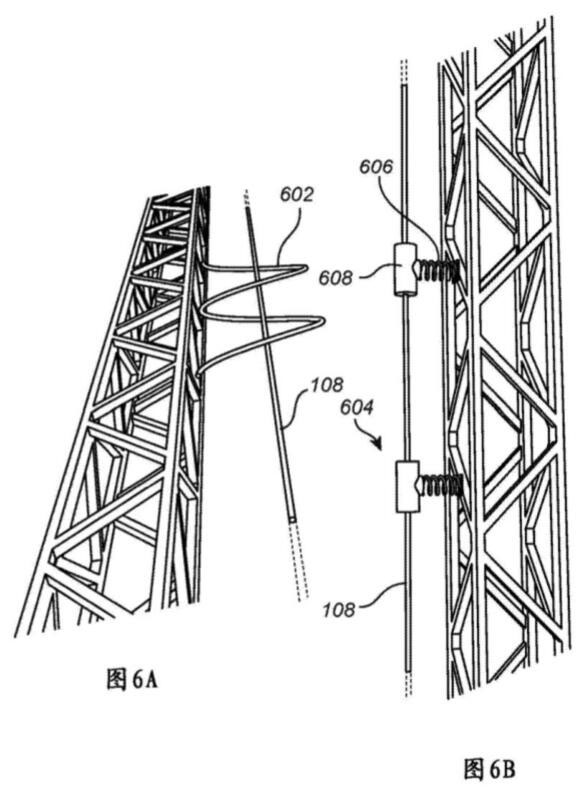
图7是示意性地示出了根据本发明的各个实施例的保持元件的反射特性的曲线图;以及图8示意性地示出了根据本发明的实施例的系统。
具体实施方式
在本详细描述中,主要参照包括单导体传输线探针的导波雷达(GWR)物位计系统来讨论根据本发明的系统的各个实施例,其中该单导体传输线探针用于朝向容纳在罐中的物品的表面导引电磁信号。经典的GwR统使用TDR 理,其中1ns 冲的序列占用约0.1GHz1GHz频谱范围。还可以使用采用载波的脉冲式系统或者FMCw统,其中该载波例如使用如IGhz2Ghz i频率范围。根据本发明的实施例的方法和系统将改进所有情况下的情形,但是针对较宽的频率范围较难获得整个频带上的良好匹配。
图1示意性地示出了根据本发明的实施例的导波雷达物位计系统和罐102。在此罐102被表示为通常在海洋应用中用于存储和运输液化天然气的类型的、基本上呈球形的罐102。实践中,图1所示的类型的若干个罐可被布置在海洋运输船上。因此,大浪状态将引起罐102中的物品104的移动,这转而导致对支承塔106以及对探针108都施加相当大的力。雷达物位计系统的电子装置如框110所示通常布置在罐的外部。图1还示出了探针108可以如何被布置成穿过机械附接至支承塔的多个保持元件112,以使得探针108在竖直方向上自由移动在水平方向上的移动受到限制。因此,由保持元件112承受在水平方向上作用在探针108上的力。而且,取决于相邻保持元件之间的距离,可以控制探针本身承受的力。因此,通过减小保持元件之间的距离,探针108承受更小的力。探针的另外示例为具有两个或更多个导体(例如平行传输线或同轴线)的传输线探针。针对使用1GHZ以下(具有300mm以上的波长)的信号的实际物位计量应用,通常使用直径为3mm 20mm 传输线。探针的其他示例包括表面波导(swG),例如单线传输线(高保(Goubau)探针)或具有或不具有介质膜的管。表面波导与波长相比可以很薄:针对1Ghz 下的使用,4mm 8mm常见的 SwG I径。探针可以由金属(例如不锈钢)、塑料(例如 PTFE)或其组合制成。
图1示意性地示出了根据本发明的实施例的导波雷达物位计系统和罐102。在此罐102被表示为通常在海洋应用中用于存储和运输液化天然气的类型的、基本上呈球形的罐102。实践中,图1所示的类型的若干个罐可被布置在海洋运输船上。因此,大浪状态将引起罐102中的物品104的移动,这转而导致对支承塔106以及对探针108都施加相当大的力。雷达物位计系统的电子装置如框110所示通常布置在罐的外部。图1还示出了探针108可以如何被布置成穿过机械附接至支承塔的多个保持元件112,以使得探针108在竖直方向上自由移动在水平方向上的移动受到限制。因此,由保持元件112承受在水平方向上作用在探针108上的力。而且,取决于相邻保持元件之间的距离,可以控制探针本身承受的力。因此,通过减小保持元件之间的距离,探针108承受更小的力。探针的另外示例为具有两个或更多个导体(例如平行传输线或同轴线)的传输线探针。针对使用1GHZ以下(具有300mm以上的波长)的信号的实际物位计量应用,通常使用直径为3mm 20mm 传输线。探针的其他示例包括表面波导(swG),例如单线传输线(高保(Goubau)探针)或具有或不具有介质膜的管。表面波导与波长相比可以很薄:针对1Ghz 下的使用,4mm 8mm常见的 SwG I径。探针可以由金属(例如不锈钢)、塑料(例如 PTFE)或其组合制成。
以下将给出示例,以示出与不使用保持元件的情况相比,使用线针和保持元件的效果。实践中,必须针对要使用探针和系统的具体应用和条件来执行仔细的强度计算,以下内容应当被视作非限制性示例。
在与圆柱体轴(中心轴)垂直的方向上作用于形成具有特定速度的流动液体,的该圆柱体上的力可以被确定为F=Acpv/2,其中,ρ为流体的密度(针对石油物品约为800kg/m),c在假设流为线性的情况下等于0.6的形式常量(form constant)。A从侧部观察的探针的面积,即针对具有6mm I径和45m 度L探针,A于0.27m。假设在整个探针上流体流的最大速度为6m/s,则作用在探针上的水平力TX为T=2.3kN.速度仅是基于如下假设的估计:在船的可以约为7s至8s的一个“摇摆周期”内流体可以从一侧移动到另一侧。速度在局部可以更高,但是另一方面,不预期速度在探针的全部延伸中相等。基于不锈
钢的特性,探针可以经受的拉伸力约为200N/mm2。针对具有6mm的直径的探针,zui大可允许拉伸力S于是将为6kN。探针因此将会在均匀施加的力的情况下呈现抛物线的形式。在此假设探针机械附接在罐的顶部和底部,探针附接的端部将随着可被确定为tan(a)=0.5T/S的角度α而向外弯曲。对于以上给出的数字,a于是变成11°,并且根据抛物线形状,探针的zui大位移d 以确定为0.25Ltan(a)=2m.显然不期望2m 位移。使用保持元件的形式的支承物,位移显著降低。使用相邻支承物之间的距离为4.5m的10个支承物,替代地位移将为20mm,这是完全可接受的。作用在每个保持元件上的力于是将变成约230N,这是合理的,并且也是使得能够设计合适的保持元件的力。
图2示意性地示出了根据本发明的实施例的雷达物位计系统,其包括电子单元202和探针108。雷达物位计系统200被安装在罐102的顶部的管嘴206上。探针108在进入罐本身之前穿过喷嘴。通过分析由探针108朝向物品104的表面114导引的发射信号S和从表面114行进返回的反射信号S测量电子单元200可以确定参考位置(例如罐顶210)与物品104的表面114之间的距离,从而可以推导出填充物位。应当注意,尽管在本文中讨论容纳单一物品104的罐102,但是可以以相似方式测量沿探针距任何材料界面的距离。如图2中示意性示出的,电子单元202包括用于发射和接收电磁信号的收发器204以及处理单元208,其中处理单元208连接至收发器204,以用于控制收发器并且处理由收发器接收的信号以确定罐102中的物品104的填充物位。处理单元208还经由接口212可连接至用于模拟和/或数字通信的外部通信线路210。此外,尽管在图2中未示出,但是雷达物位计系统通常可连接至外部电源,或者可以通过外部通信线路210供电。可替代地,雷达物位计系统可以被配置成进行无线通信。
图3示意性地示出了螺旋形式的保持元件302的示例实施例。使用螺旋状保持元件302的优点是探针108可以从侧部插入到保持元件302中,这可以简化探针的安装。
图4A至图4D示出了保持元件的替选实施例。在图4A中,保持元件402被提供为两个弧形或半圆性部分403a和403b的形式,部分403a和403b一起作用以限定探针108使得探针108的水平移动受到限制。图4B示出了保持元件404包括被布置成三角形形状并且在竖直方向上相互间隔开的三个销或杆405a-405c。
在一些应用中,可能期望确保探针108关于保持元件根本不移动。例如,沿探针传播的信号的传播特性通常在探针与保持元件接触的每个点处将会是不同的,并且保持元件对传播信号的影响还可取决于探针与保持元件之间的距离。因此,在精度非常重要以及表面回波弱(例如当测量表面可能汹涌的罐中的LMG时情况就可能是这样的)的应用中,可能期望降低由保持元件产生的干扰回波信号的变化。解决上述问题的一种方式为提供如下保持元件:这些保持元件被布置并配置为使得由保持元件产生的回波信号的属性是已知的。这可以通过以下述方式来设置保持元件来实现:探针已经在沿探针的已知位置处与保持元件接触。这样的布置将还要求探针或保持元件为电绝缘的。可以通过将探针包围在绝缘材料(例如 PTFE)中使探针为电绝缘的。然而,PTFE A对柔软,因此对当探针在竖直方向上移动并与保持元件摩擦时可能出现的机械磨损是敏感的。优先选择可以为使用例如陶瓷绝缘
材料的材料对保持元件的与探针接触的部分进行包围,该材料具有良好的电绝缘性并且对机械磨损可复原。非常耐用的陶瓷附件例如由于电力线路而众所周知。
在使用被布置成与探针接触的保持元件的示例中,探针的直径优选地是恒定的以便利探针关于保持元件的竖直移动。
图4C示意性地示出了与图4A的保持元件相似的保持元件406,但是其中销403a-403b被布置成与探针108接触,从而形成被良好限定的接触部分。为了降低从保持元件所产生的回波信号,将接触部分之间的距离选择成等于沿探针传播的发射信号的中心频率的波长的四分之一即λ/4。因此,来自第一接触部分403a的反射信号和来自第二接触部分403b的反射信号被移了λ/2,从而在所产生的叠加回波信号中产生了相消干涉。优选地,来自第一接触部分403a的反射信号的幅度等于来自第二接触部分403b的反射信号的幅度。
在图4D中,示出了包括三个接触销412a-412c的保持元件410。同样,在此,相邻接触部分之间的距离为λ/4。然而,为了实现所产生的回波信号的有效降低、即有效的相消干涉,必须控制来自各个接触部分中的每个的反射信号的幅度。当使用三个接触部分时,来自第一接触部分412a和第三接触部分412c的反射信号的幅度约为来自第二接触部分4l2b的反射信号的幅度的一半。
如图4E所示,当使用包括四个接触销416a-416d的保持元件414时,配置这些接触部分,使得第一反射信号的幅度等于第四反射信号的幅度,第二反射信号的幅度等于第三反射信号的幅度,并且第一反射信号和第四反射信号的幅度约为上述第二反射信号和第三反射信号的幅度的三分之一。
上述构思当然可以扩展至使用五个或更多个接触部分。然而,存在所使用的接触部分的数量与发射信号的总体能量损失之间的权衡。因此,通常基于诸如发射信号的幅度和精确检测表面回波所需要的分辨率的参数来确定保持元件的精确配置。
另外,对于反射信号的产生,并不需要探针与接触销之间的直接机械接触。例如,保持元件的一部分或销可被布置在距探针己知距离处并且仍对沿探针传播的信号的一部分进行反射。因此,保持元件的接触部分与非接触部分之间的各种组合是可以的。例如,可以使用如图4D所示的包括三个接触部分的保持元件,以用于与被布置在探针附近的两个非接触部分一起将探针保持在固定位置,使得提供期望幅度的反射信号。例如,假设发射信号的中心频率为1GHZ,相邻接触部分之间的距离即λ/4为7.5cm。针对更高的频率(诸如例如10GHZ以上),相邻部分之间所需要的距离可能会太小而
至少在本申请中是不实际的。针对 GwR统,若干GHz D下的频率通常zui适合将电阻损耗维持在足够低。
图5A示出了包括由陶瓷壳506包围以提供电绝缘的金属棒504的保持元件的销502的示例实施例。当使用销502作为接触销时,可以通过控制陶瓷壳506的厚度来控制由销502反射的信号的幅度,其中越厚的绝缘体导致幅度越低的反射信号。金属芯及陶瓷壳或涂层的上述配置可以自然地用于任何几何形状的保持元件。
图5B示意性地示出了如下的保持元件的销508的示例实施例:其包括中心金属棒504、由被布置成围绕中心棒504的柔性材料制成的中间部分510、以及外部电绝缘壳或涂层506。柔性中间部分510可以用作减震器,例如以避免振动从支承结构106传递至探针108。柔性材料可以例如为PTTE、橡胶或提供期望的机械缓震特性的任何相似材料。
图5B示意性地示出了如下的保持元件的销508的示例实施例:其包括中心金属棒504、由被布置成围绕中心棒504的柔性材料制成的中间部分510、以及外部电绝缘壳或涂层506。柔性中间部分510可以用作减震器,例如以避免振动从支承结构106传递至探针108。柔性材料可以例如为PTTE、橡胶或提供期望的机械缓震特性的任何相似材料。
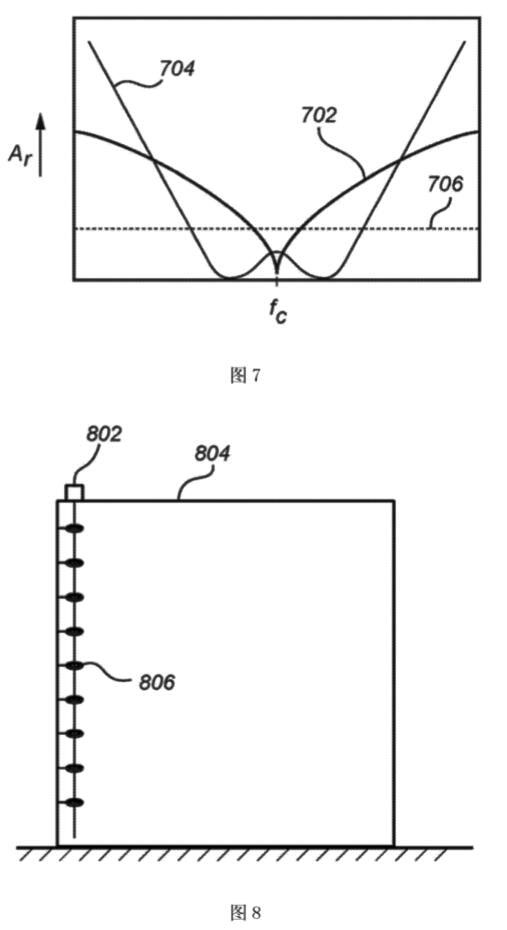
图6A示出了具有波形结构或可以被视作“平展的”螺旋的形式的保持元件602所示的接触元件602被布置成在四个不同位置处与探针108接触。图6B示意性地示出了包括柔性部分606和固定附接至探针的电绝缘夹持部分608的保持元件604。柔性部分606在此被示出为弹簧,用于允许探针竖直移动同时限制探针108水平移动。因此由柔性元件的配置确定了探针的被允许的移动。另外,夹持部分的与探针108接触的部分通常是绝缘的。引起来自保持元件604的反射信号的导电部分可以集成在每个夹持部分608中。实现所产生的反射回波信号的期望属性的另一种选择是将间隔开λ/4的若干个导电反射部分集成在夹持部分608内。图7示意性地示出了作为频率的函数的、从保持元件反射的所产生的回波信号的属性。A对应于所产生的回波信号的幅度,而f是沿探针传播的发射信号的中心频率。曲线702对应于来自具有两个接触部分的保持元件的所产生的回波信号,而曲线704是来自
具有三个接触部分的保持元件的。线706表示幅度阈值,反射信号优选保持在该幅度阈值之下。
由图7可见,对于包括更多个接触部分的保持元件,回波信号在阙值706以下的部分的带宽是更宽的。
图8示出了被布置在不具有支承结构的罐804中的雷达物位计系统802。替代地,保持元件806被布置在罐的侧壁上。
尽管已经参照本发明的特定示例性实施例描述了本发明,但是对本领域的技术人员而言许多不同的改变、修改等将会是明显的。例如,保持元件的各种配置和几何形状是可以的。此外,应当注意,本系统的部件可以以各种方式被省略、交换或布置,而物位计系统仍能够执行本发明的功能。
- 上一篇:电磁流量计在烧结红泥流量计量中的应用
- 下一篇:没有了

江苏正邦仪表有限公司
手机:165-7620-4888
邮箱:252223668@qq.com
地址:江苏省淮安市金湖县工一路16号
QQ: 252223668
- 返回顶部
- 165-7620-4888
- 在线咨询
- 微信二维码
